| ||||
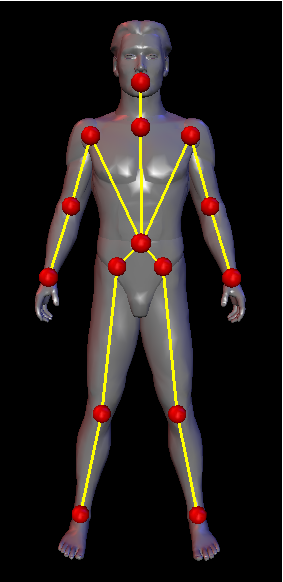
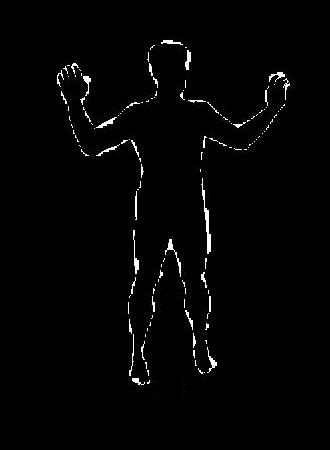
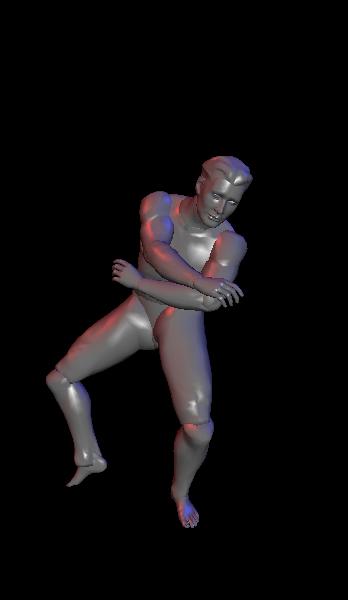
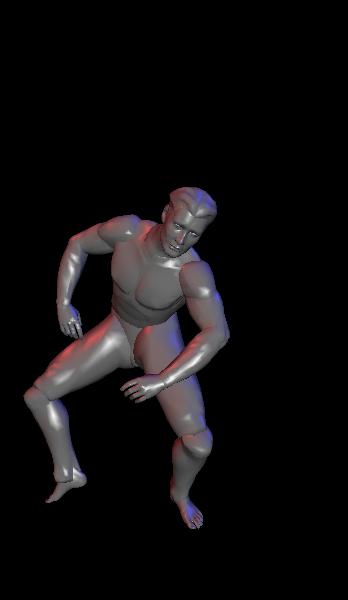
| Figure 1: Body model with underlying skeleton structure (l). Energy function for one camera views (r). | ||||
|
| ||||
| Figure 1: Body model with underlying skeleton structure (l). Energy function for one camera views (r). | ||||
|
||||
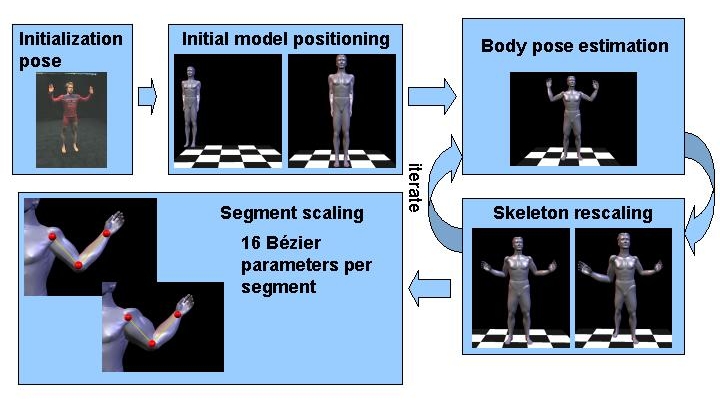
| Figure 2: Schematic overview of the initialization method. | ||||



|
||||
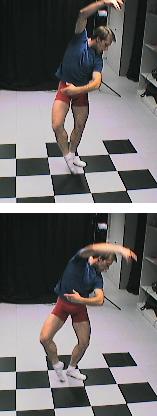
| Figure 3: Input images and corresponding poses of the body model as they are found by the motion capture method. | ||||