max planck institut
informatik
informatik


Max-Planck-Institut für Informatik
Saarland Informatics Campus
Department 6: Visual Computing and Artificial Intelligence
Campus E1 4, Room 217
66123 Saarbrücken
Germany
Email:
Get my email address via email
Phone: +49 681 9325 4017

|
VNect: Real-time 3D Human Pose Estimation with a Single RGB Camera D. Mehta S. Sridhar O. Sotnychenko H. Rhodin M. Shafiei H. Seidel W. Xu D. Casas C. Theobalt Special Interest Group on Computer GRAPHics and Interactive Technique (SIGGRAPH) 2017 We present the first real-time method to capture the full global 3D skeletal pose of a human in a stable, temporally consistent manner using a single RGB camera. [project page] |
|
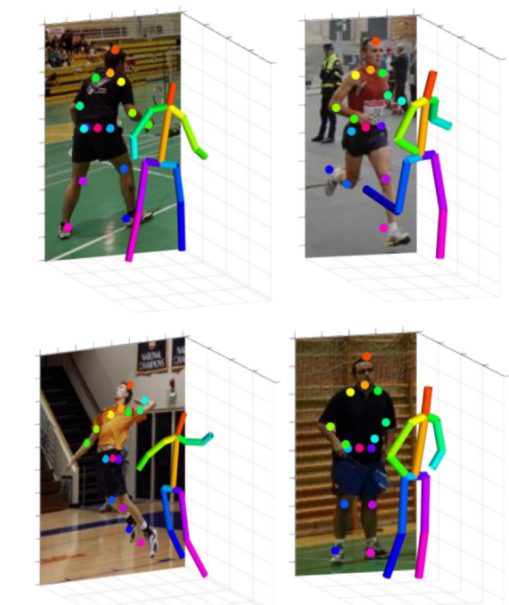
Monocular 3D Human Pose Estimation In The Wild Using Improved CNN Supervision D. Mehta H. Rhodin D. Casas O. Sotnychenko W. Xu C. Theobalt International Conference on 3D Vision (3DV) 2017 We propose a CNN-based approach for 3D human body pose estimation from single RGB images that addresses the issue of limited generalizability of models trained solely on the starkly limited publicly available 3D pose data. [project page] |
|
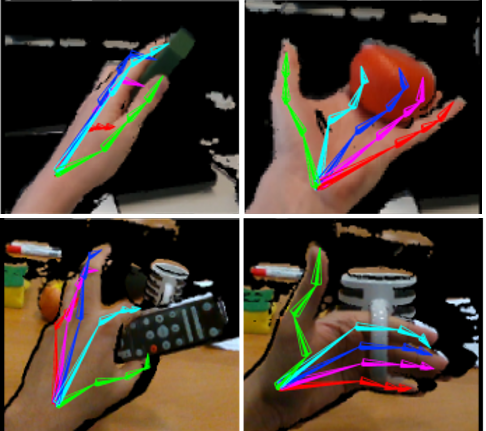
Real-time Hand Tracking under Occlusion from an Egocentric RGB-D Sensor F. Mueller D. Mehta O. Sotnychenko S. Sridhar D. Casas C. Theobalt International Conference on Computer Vision (ICCV) 2017 We present a method for real-time hand tracking under occlusion in cluttered egocentric scenes from a single RGB-D camera. To enable training of our machine learning components, we introduce a new large-scale dataset SynthHands which was captured using a mixed reality approach. Furthermore, we propose a real benchmark dataset EgoDexter which provides annotated fingertip positions. [project page] |