
Homepage
Contact

Navami Kairanda
Max-Planck-Institut für InformatikD6: Visual Computing and Artificial Intelligence
| office: |
Campus E1 4,
Room 115E Saarland Informatics Campus 66123 Saarbrücken Germany |
|---|---|
| email: |
Get my email address via email |
| phone: | +49 681 9325 4549 |
| links: | X (formerly Twitter) Google Scholar CV Github |
Hi, I am Navami Kairanda.
I am a Ph.D. student under the supervision of Dr. Vladislav Golyanik and Prof. Dr. Christian Theobalt in the 4DQV group at the Max Planck Institute for Informatics and Saarland University, Saarbrücken, Germany.
Research Interests
- Physics-based, Neuroexplicit Approaches in Vision and Graphics
- Modelling and Simulation of Clothes
- 3D Reconstruction and Tracking of Deformable Objects
News
- 12.06.2025: [New] Invited student lightning talk at the CVPR 2025 Workshop on Vision Meets Physics.
- 30.05.2025: [New] Curious about our research or what it's like to work and collaborate at our institute? Hear from me and other MPI researchers in the short film.
- 24.10.2024: Our works got featured in the latest issue of Google's Aufbruch Magazine (#31) and I contributed to the cover photo!
- 12.09.2024: The source code of NeuralClothSim is now available here: GitHub link.
Publications
 |
Thin-Shell-SfT: Fine-Grained Monocular Non-rigid 3D Surface Tracking with Neural Deformation Fields Navami Kairanda, Marc Habermann, Shanthika Naik, Christian Theobalt, Vladislav Golyanik Computer Vision and Pattern Recognition (CVPR), 2025, Nashville [paper] [project page] [video] [source code (coming soon)] |
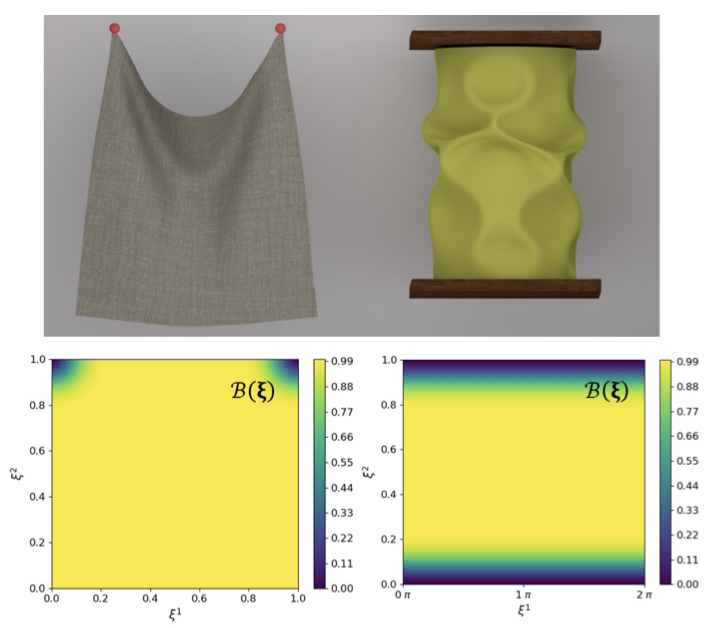 |
NeuralClothSim: Neural Deformation Fields Meet the Thin Shell Theory Navami Kairanda, Marc Habermann, Christian Theobalt, Vladislav Golyanik Neural Information Processing Systems (NeurIPS), 2024, Vancouver [paper] [project page] [video] [source code] |
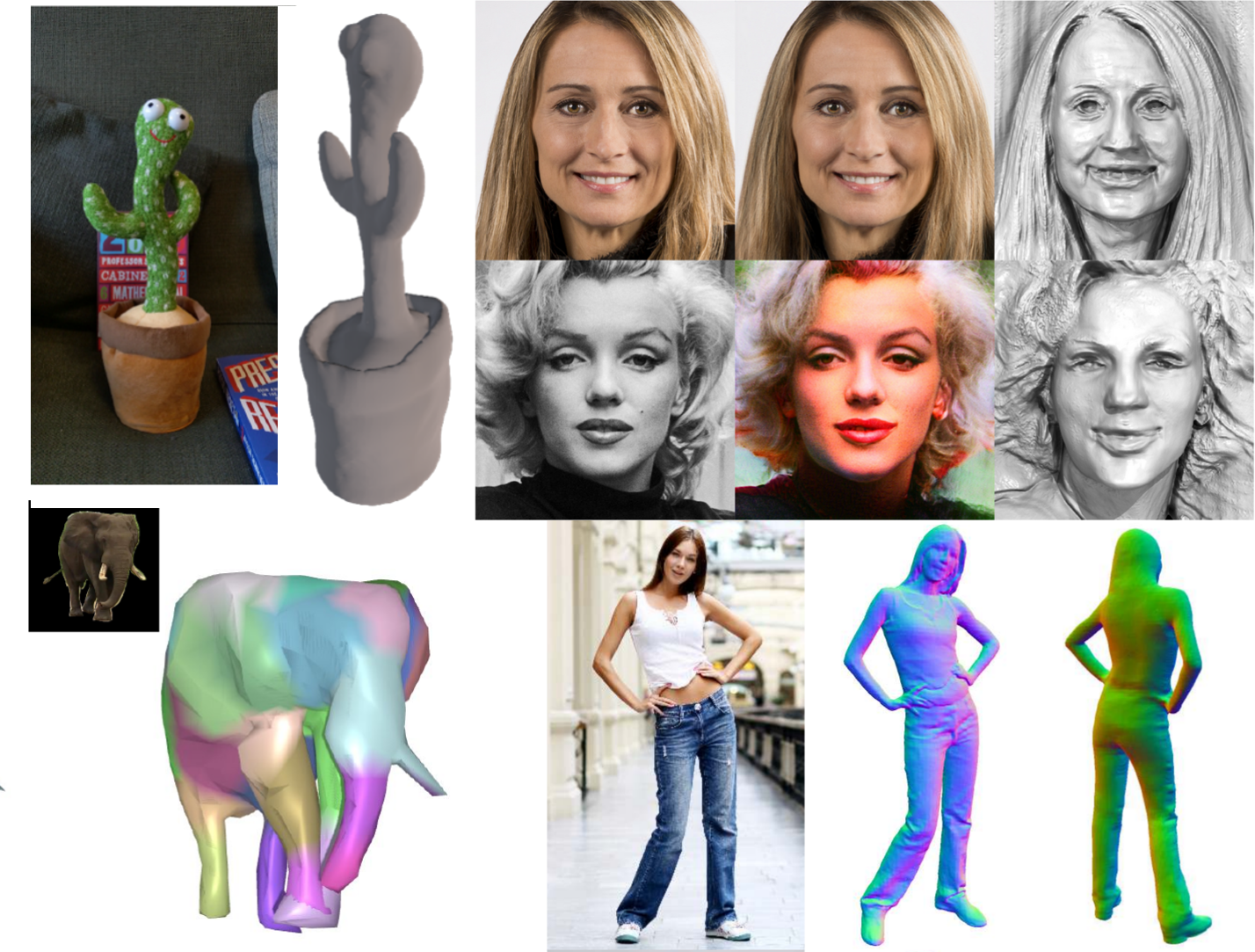 |
State of the Art in Dense Monocular Non-Rigid 3D Reconstruction
Edith Tretschk*,
Navami Kairanda*,
Mallikarjun B R,
Rishabh Dabral,
Adam Kortylewski,
Bernhard Egger,
Marc Habermann,
Pascal Fua,
Christian Theobalt,
Vladislav Golyanik
(* equal contribution) Eurographics (STAR Report), 2023, Saarbrücken [paper] [project page] [talk] |
| φ-SfT: Shape-from-Template with a Physics-based Deformation Model Navami Kairanda, Edith Tretschk, Mohamed Elgharib, Christian Theobalt, Vladislav Golyanik Computer Vision and Pattern Recognition (CVPR), 2022, New Orleans [paper] [project page] [video] [source code] [dataset] Master Thesis, Saarland University [pdf] |
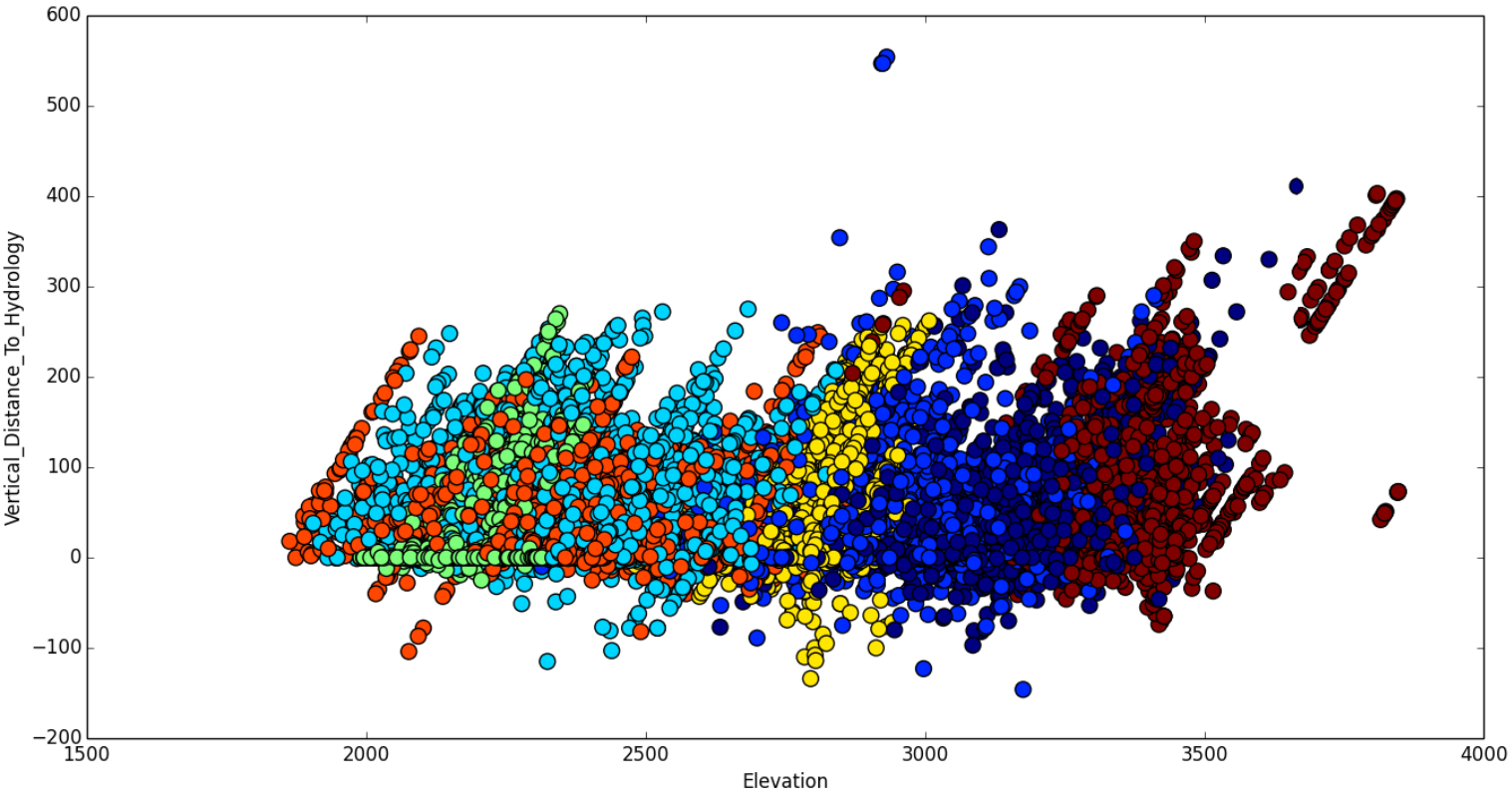 |
Feature Engineering on Forest Cover Type Data with Ensemble of Decision Trees
HR Pruthvi*,
Nisha KK*,
Chandana TL*,
Navami Kairanda*,
Biju R Mohan
(* equal contribution) IEEE International Advance Computing Conference (IACC), 2015, Bangalore [paper] Bachelor Thesis, National Institute of Techonology Karnataka [pdf] |
Recent Positions
- September 2020 -- September 2021:
Student assistant in Graphics, Vision & Video (group leader: Prof. Dr. Christian Theobalt) at the Max-Planck-Institut für Informatik, Germany - August 2019 -- January 2020:
Student assistant in Real Virtual Humans (group leader: Prof. Dr. Gerard Pons-Moll) at the Max-Planck-Institut für Informatik, Germany - May 2014 -- July 2014:
Research internship at Samsung Research & Development Institute India, Bangalore, India
Education
- March 2022 -- present:
Ph. D. student in Computer Science at the Universität des Saarlandes, Saarbrücken, Germany and the Max-Planck-Institut für Informatik
- April 2019 -- February 2022:
Masters in Visual Computing at the Universität des Saarlandes, Saarbrücken, Germany
- July 2011 -- May 2015:
Bachelors in Informations Technology at the National Institute of Techonology Karnataka, Surathkal, India
Academic Services
- Reviewing (Conferences):
Computer Vision and Pattern Recognition 2024, 2025; International Conference on Computer Vision 2025; Neural Information Processing Systems 2025 - Reviewing (Journal):
Transactions on Visualization and Computer Graphics 2023; Computer Vision and Image Understanding 2023
Teaching
- Seminars:
SS2025: Advanced Topics of Computer Vision and Computer Graphics in the Age of Artificial Intelligence, Saarland University SS2024: Classical Concepts of Computer Vision and Computer Graphics in the Neural Age, Saarland University SS2023: Computer Vision and Machine Learning for Computer Graphics, Saarland University SS2022: Computer Vision and Machine Learning for Computer Graphics, Saarland University
Supervised Students
- Shanthika Naik, Oct 2023 - Oct 2024 (MSc student intern, currently research fellow at IIT Jodhpur)
- Takuya Nakabayashi, Sept 2024 - ongoing (PhD student intern, Keio University)